← Назад на главную
3D-печатная миниатюрная модель сопряжения плечевого механизма человека и робота
Инструменты и технологии: SolidWorks, MATLAB, кинематика четырёхзвенных механизмов, кабельно-приводные параллельные механизмы, 3D-печать
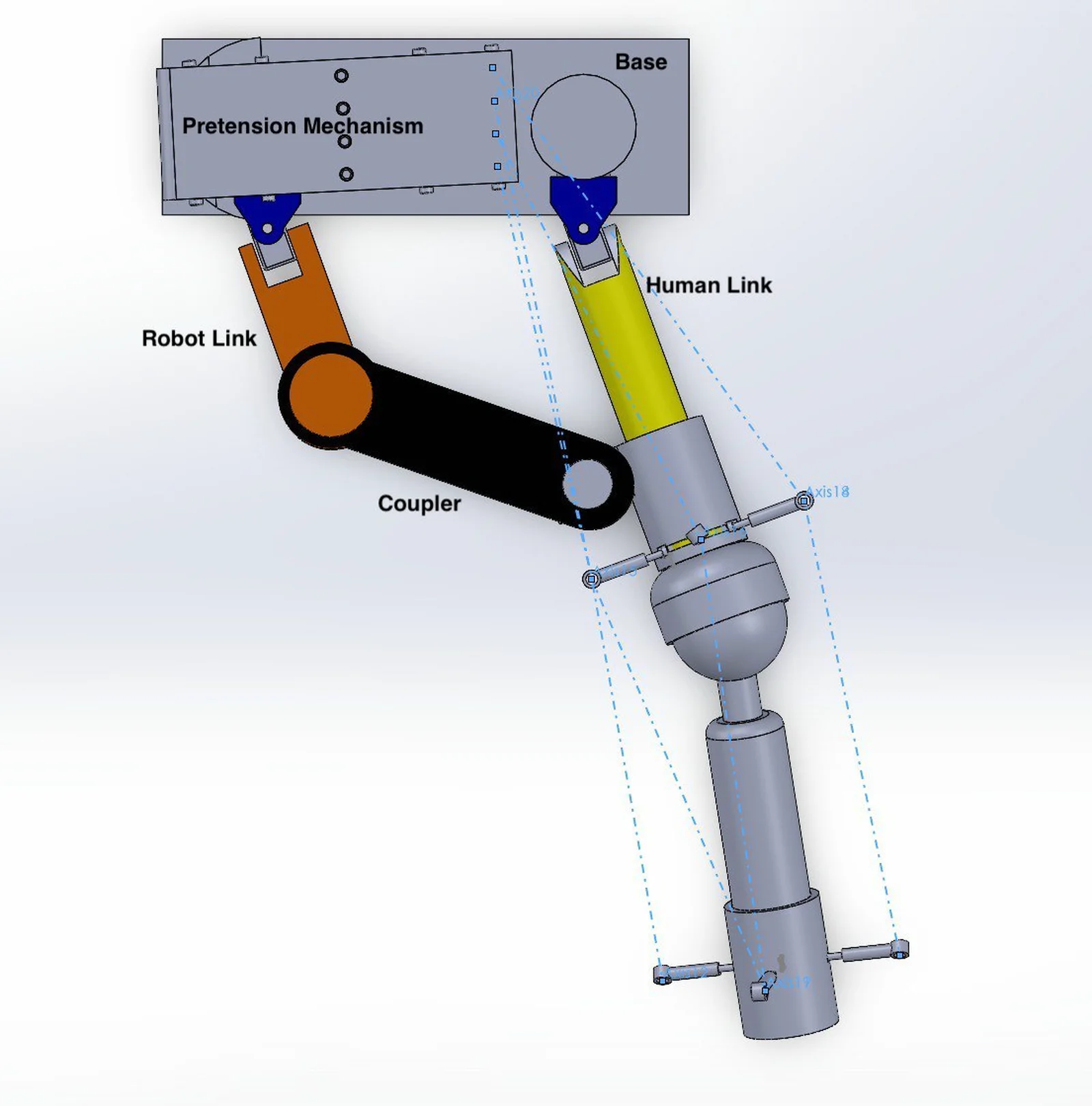
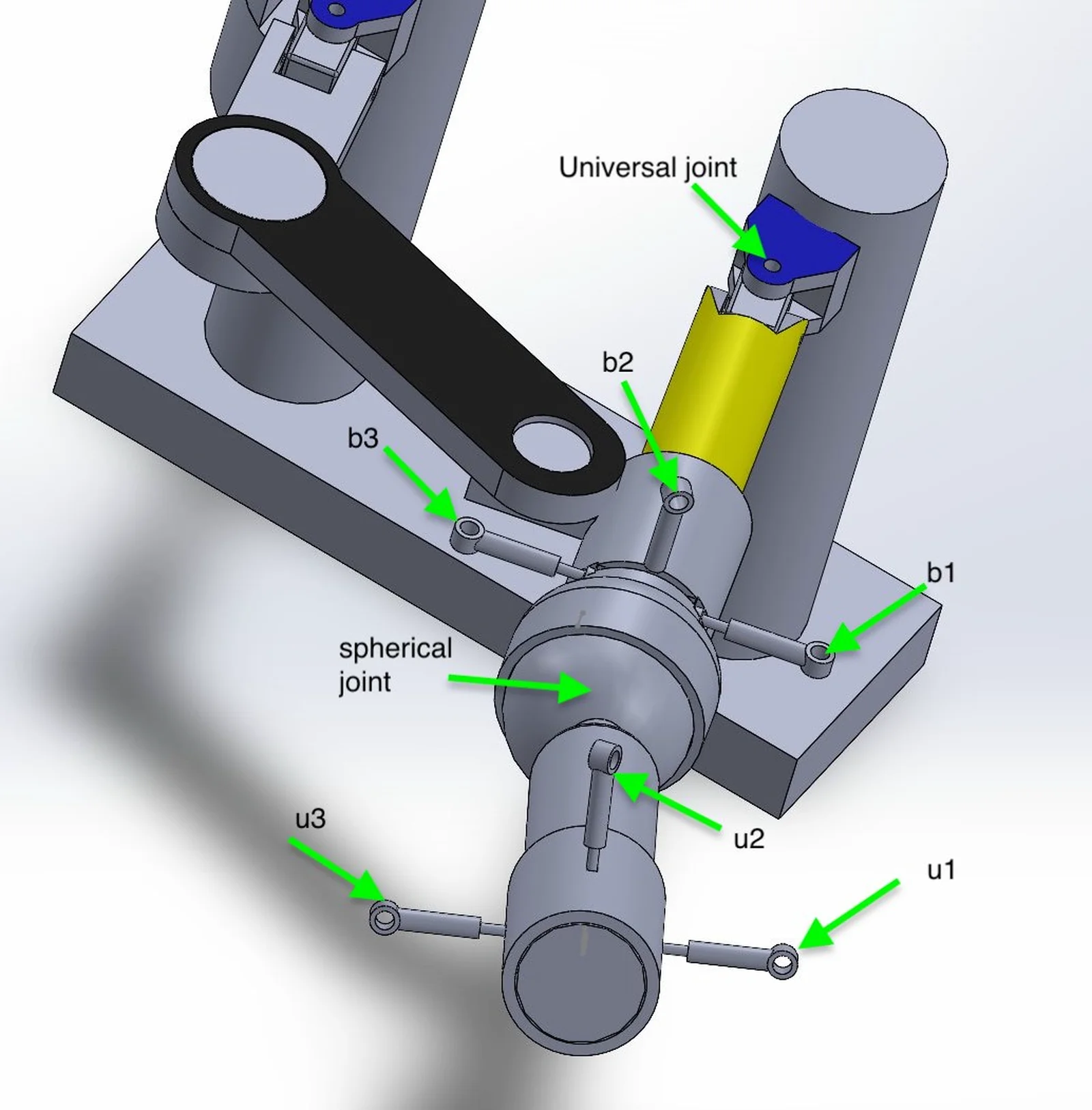
- Спроектировал 5-DOF миниатюрный механизм сопряжения плечевого сустава, объединяющий 2-DOF четырёхзвенный кривошипно-коромысловый механизм для плечевого пояса с 3-DOF кабельно-приводным параллельным механизмом для плечелопаточного сустава, моделируя три вращательные и две поступательные степени свободы плеча.
- Вывел прямую и обратную кинематику как для четырёхзвенного механизма, так и для кабельно-приводного механизма, затем проверил уравнения относительно CAD-модели в SolidWorks с помощью MATLAB, добившись совпадения длин кабелей и углов суставов с точностью до 1–2 мм и нескольких градусов.
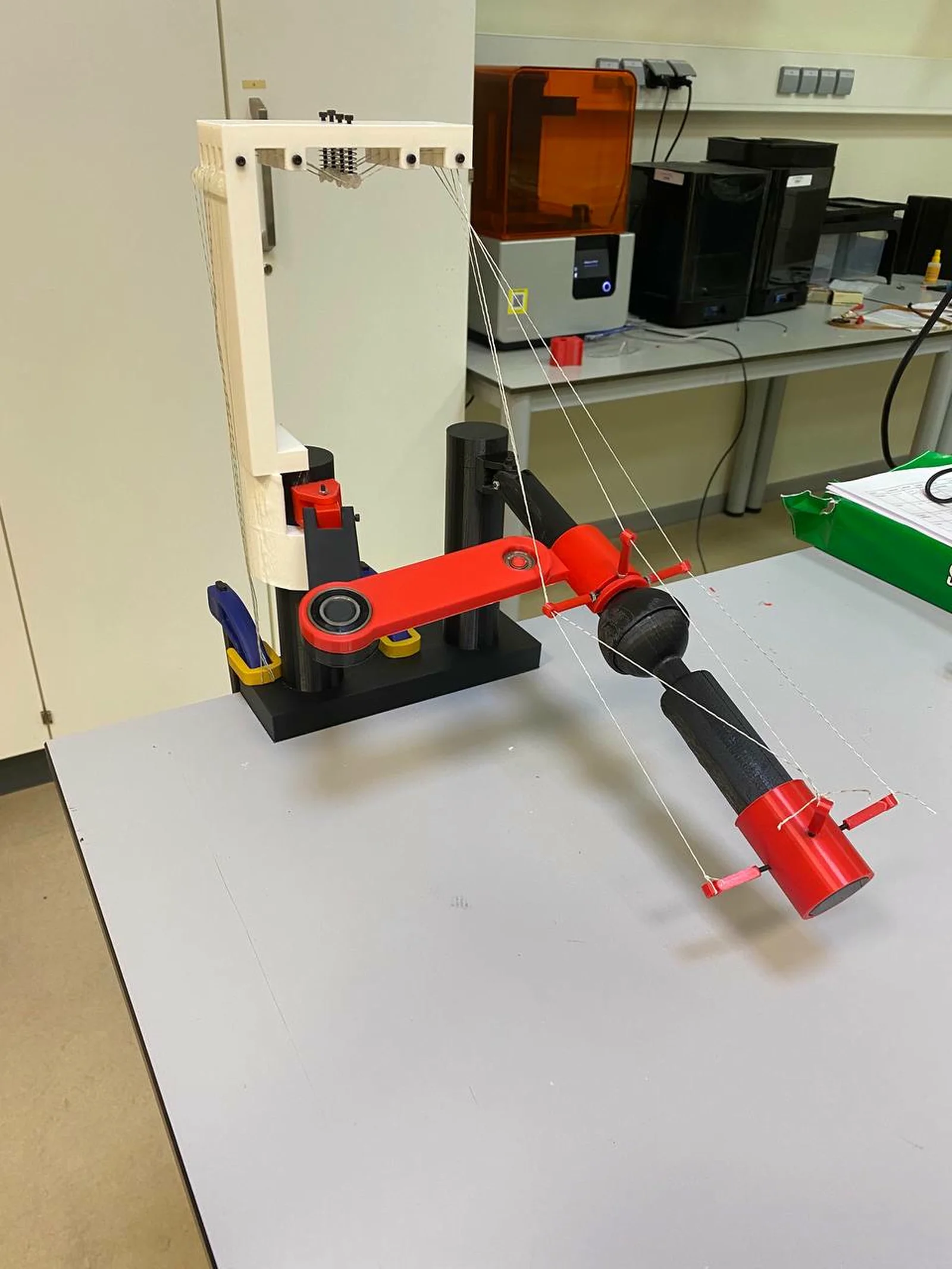
- Разработал механизм предварительного натяжения для устранения провисания и схода кабелей, а также собрал регулируемый 3D-печатный прототип с переставляемыми точками крепления кабелей для проверки различных стратегий сопряжения.
- Этот базовый прототип позже стал основой для полноразмерного 5-DOF экзоскелета, разработанного в CEMRR.